UGV
物流など
-
UGV

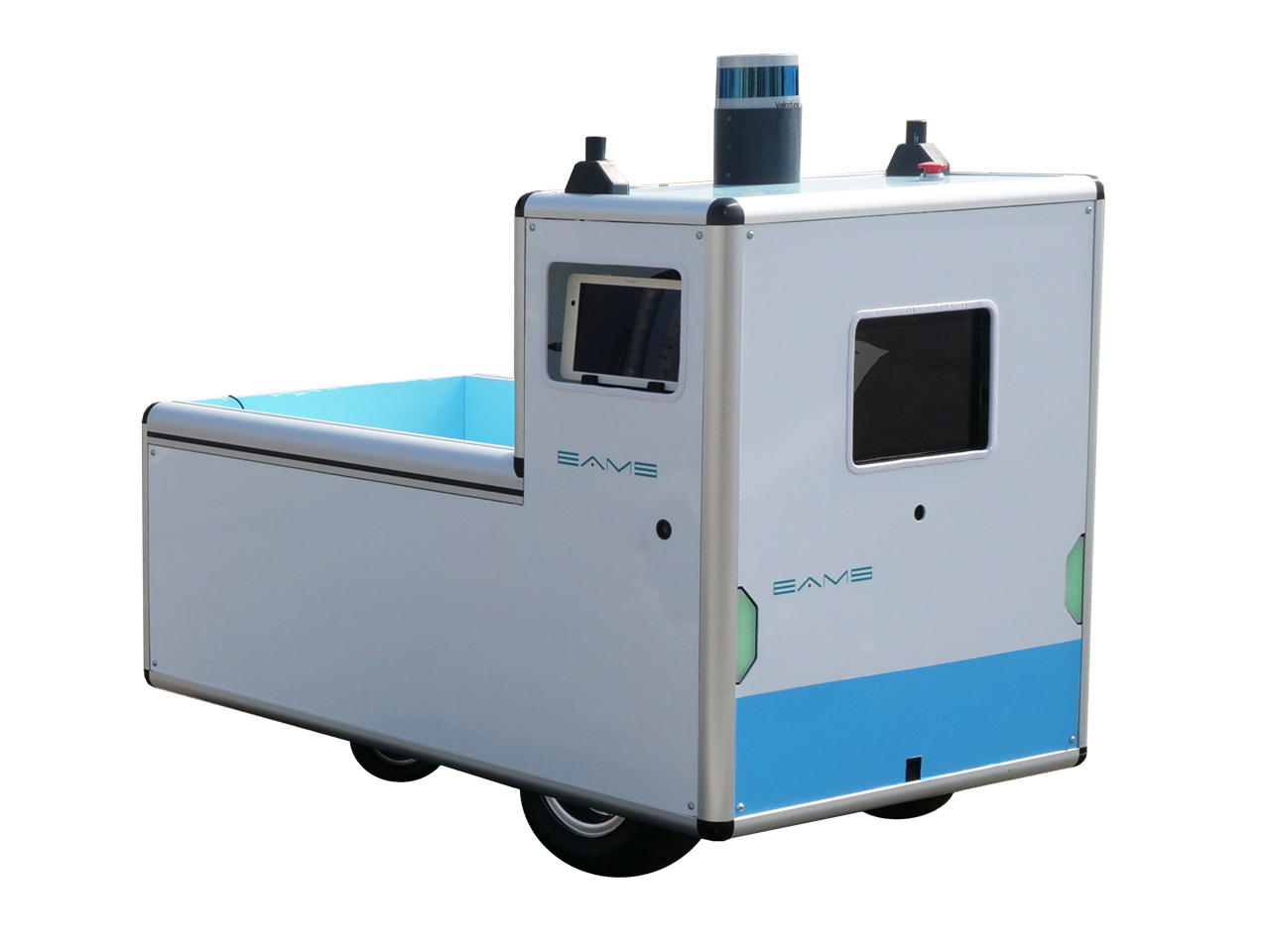
屋内外をシームレスに走行可能
屋外走行時はGPS/GNSS+ビジュアルスラムによる制御、
屋内走行時はLiDAR+ビジュアルによる制御と2通りの走行プログラムを
バランスよくチューニングすることにより
立ち止まることなくシームレスに走行できる技術を開発しています。


将来は宅配などの物流業界へ
センサーは主に、衛星、LiDAR、ビジュアルスラムなどを総合的に用いて
高精度な自律走行を実現しています。
屋内に限らず、衛星の入らない現場での運用が可能です。
マップの読み込みなどに時間を必要としないことなども高く評価されており、
様々な地域での活躍が期待されています。
詳しい内容はこちらの動画をご覧ください。
研究開発用UGV R-421
ArduPilotによる自律制御研究開発向けのUGVです。 カスタマイズ性に富み、様々なユニットの取り付けが可能です。
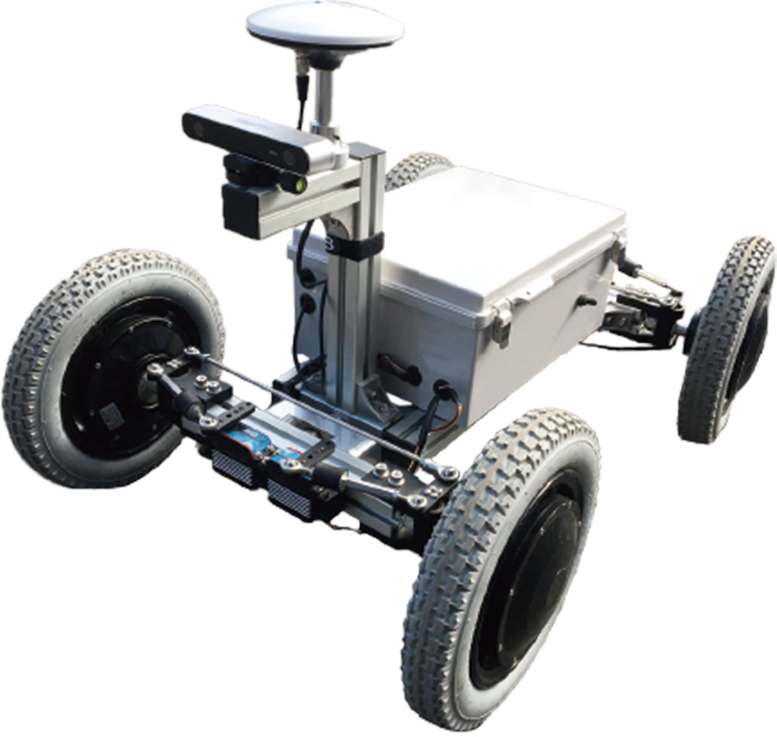
<搭載品事例>
- マイクロコンピュータ
- みちびき対応アンテナ
- N-Trip対応アンテナ
- LiDAR
- ビジュアルスラム
- 映像伝送装置
標準スペック
| サイズ | 870 × 630 × 420mm | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| サイズ(ホイールベース) | 510mm | ||||||||
| 本体重量 | 40kg | ||||||||
| 最大積載重量 | 100kg | ||||||||
| 走行時間 | 45分 | ||||||||
| 最大速度 | 約6km/h | ||||||||
| 防滴性能 | あり | ||||||||
| オートパイロットシステム |
|
||||||||
| 送信機 | 双葉電子工業製 | ||||||||
| オプション |
|
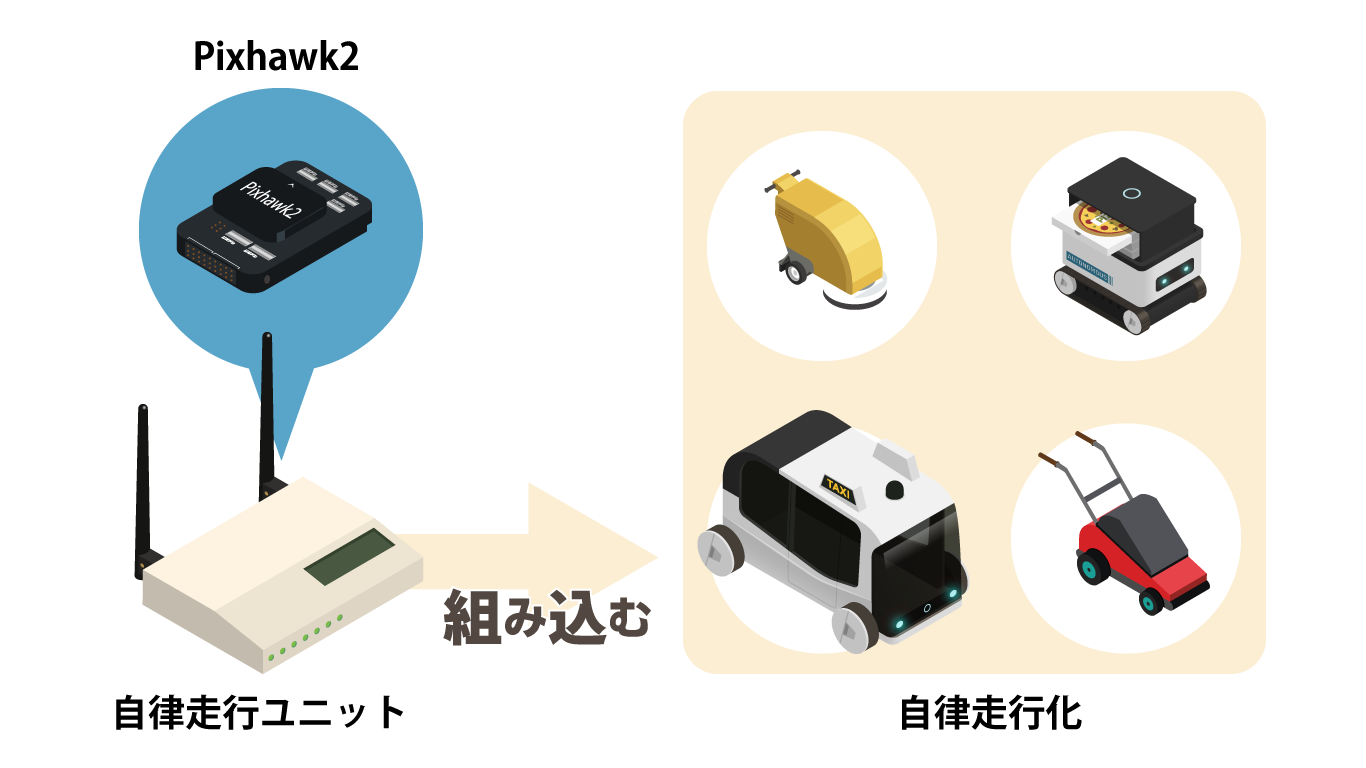
自律走行化への挑戦
EAMSはArduPilotの強みを活かすために
様々なマシンの「自律走行化」の研究開発を進めています。
元はエンジンで動いているマシンでも、電子制御に改造を施し
Pixhawk2で自律走行させることができます。
これまでに様々な企業様とタイアップさせていただきながら
「自立制御化」のビジネス化を目指してきました。
 茶刈り機の自動走行化に成功
茶刈り機の自動走行化に成功 草刈り機の自動走行化に成功
草刈り機の自動走行化に成功 非GPS下での自動走行化に成功
非GPS下での自動走行化に成功 大型車両の自動走行化に成功
大型車両の自動走行化に成功
ユニットを組み込むだけで自律走行化
マシンごとに特性が異なるため
単純にPixhawk2と繋げるだけでは制御は困難です。
ご要望に応じて、接続先となるマシンへの通信仕様や制御仕様をヒアリングし
それ専用の「自律走行ユニット」を開発いたします。
まだまだ課題はありますが一歩ずつ着実に進めてまいります。